Pengertian Robot Line Follower
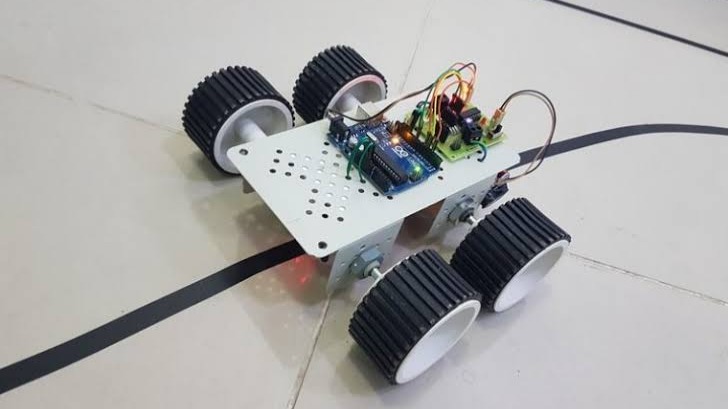
Line Follower adalah salah satu robot yang memiliki cara kerja berprinsip berjalan mengikuti garis. Robot ini menggunakan photodiode sebagai sensor cahaya yang mana hasil pembacaan sensor kemudian dikirim ke mikrokontroller. Robot line follower di masukkan dalam jenis robot yang memiliki prinsip kerja sederhana. Sesuai namanya, robot ini akan bergerak mengikuti garis yang telah di buat oleh manusia.
Robot ini mendeteksi garis dengan menggunakan sensor infrared yang terpasang padanya. Data hasil pembacaan sensor dikirim ke mikrokontroler, kemudian mikrokontroler akan menggunakan data tersebut untuk memutuskan arah gerak robot. Pada programnya juga dapat di tanamkan logika fuzzy dan PID untuk meningkatkan responsibilitas robot satu ini. Dalam industri, robot ini di manfaatkan untuk mengangkut barang dalam jumlah kecil maupun besar dalam satu jalur yang tidak memiliki percabangan. Desain dan spesifikasi robot line follower di buat dengan menyesuaikan fungsi yang akan di jalankannya. Jika robot line follower di rancang untuk mengangkut barang yang berat, maka kapasitas motor yang di gunakan juga harus besar agar robot ini dapat menjalankan tugasnya dengan baik.
Cara Kerja
Sensor mengirimkan data jika photo di oda dalam sensor terkena cahaya, maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan berlogika 1. Selanjutnya pada komparator akan di bandingkan tegangan input (tegangan dari sensor) dengan tegangan referensi (tegangan dari variabel transistor). Apabila tegangan input lebih besar dari tegangan referensi maka tegangan outputnya akan sama dengan tegangan maks power supply (high/1), apabila tegangan input lebih kecil dari tegangan referensi maka tegangan outputnya akan sama dengan tegangan min power supply (low/0). Setelah itu, data akan dikirmkan ke driver motor yang berfungsi untuk menggerakkan motor kanan dan motor kiri.



0 Komentar